SQA-010
[Paper] Consistency models
Main idea: 让每个 ODE trajectory 上面每个点都输出对应的数据点, 从而直接一步从噪声生成图片
这里我们使用的记号是 0 时刻是 data, $T$ 时刻是 noise, SDE \(\text dx_t = -t \nabla \log p_t(x_t)\text dt\)
$t$ 时间的分布等效于 $x+t\epsilon$
Parameterization
我们希望 $f(x_0, 0)=x_0$. 采用的方法是使用 \(f(x, t) = c_{\text{skip}}(t)x+c_{\text{out}}F_{\theta}(x, t)\) 然后让 0 时候手动等于 $x_0$
Sampling
除了一步生成, 也可以多步生成, 每次加点噪声. Schedule 自己调.
Distill from a diffusion model $s_{\phi}(x, t)$
先找出离散的时间点 $0=t_1, \cdots, t_N=T$
方法是和 EDM 一样的方法 $\rho=7$
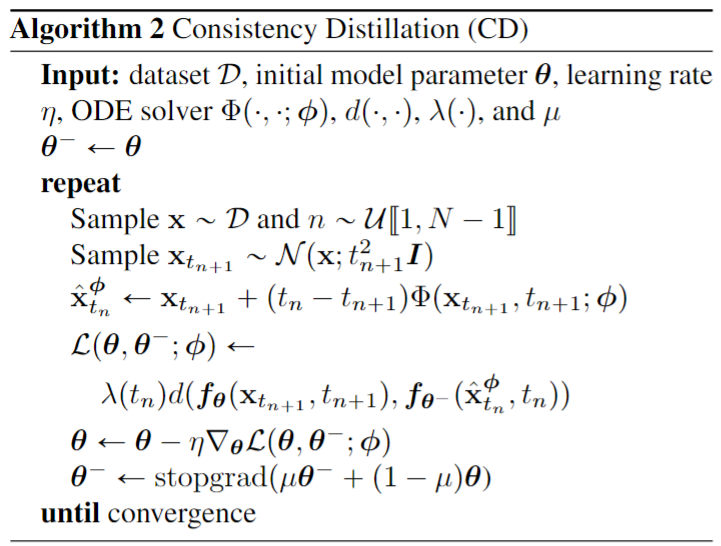
其中 $\Phi(x, t, \phi) = -ts_{\phi}(x, t)$ 是走一步 ODE (这里对应 euler, 也可以用别的 ODE solver)
Directly train a consistency model
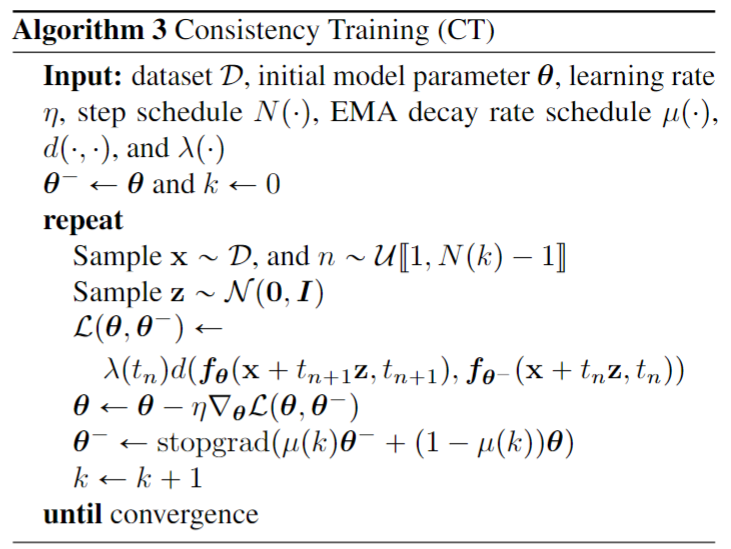
其中利用了 \(\nabla \log p_t(x_t) = \mathbb E\left[\frac{x_t-x}{t^2}\mid x_t\right]\)
文中还提到训练的时候 $N$ 应该逐渐加大 (intuition: $N$ 小的时候, consistency training loss more bias but less variance)
Details
对于 CD, 使用 LPIPS (Learned Perceptual Image Patch Similarity) 来计算相似度, 以及训练时候使用 Heun 18 steps 最佳.
对于 CD, 当 $N$ 充分大的时候, 再增加也表现差不多 (一般取到 80 差不多)
对于 CT with continuous time training, helpful if 把模型初始化成 EDM model….. 唐 (猜测是 large variance of loss)
discrete time 随机初始化可以 work
parameterization: 使用 \(c_{\text{skip}}(t) = \frac{\sigma_{\text{data}}^2}{t^2+\sigma_{\text{data}}^2}, \quad c_{\text{out}} = \frac{\sigma_{\text{data}}t}{\sqrt{t^2+\sigma_{\text{data}}}^2}\)
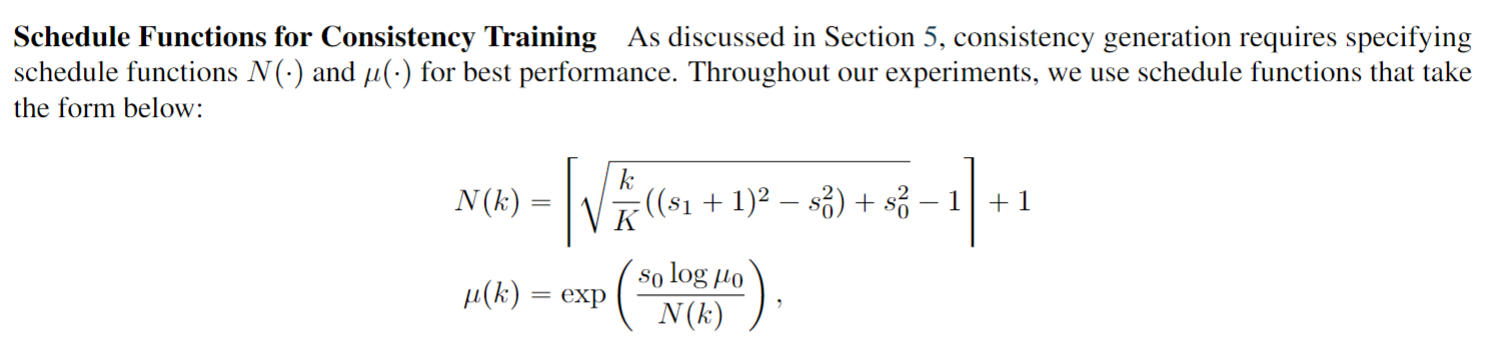
$N$ & EMA schedule: 有深意
To do LPIPS, rescale image to 224x224 with bilinear.
Zero-shot image editing
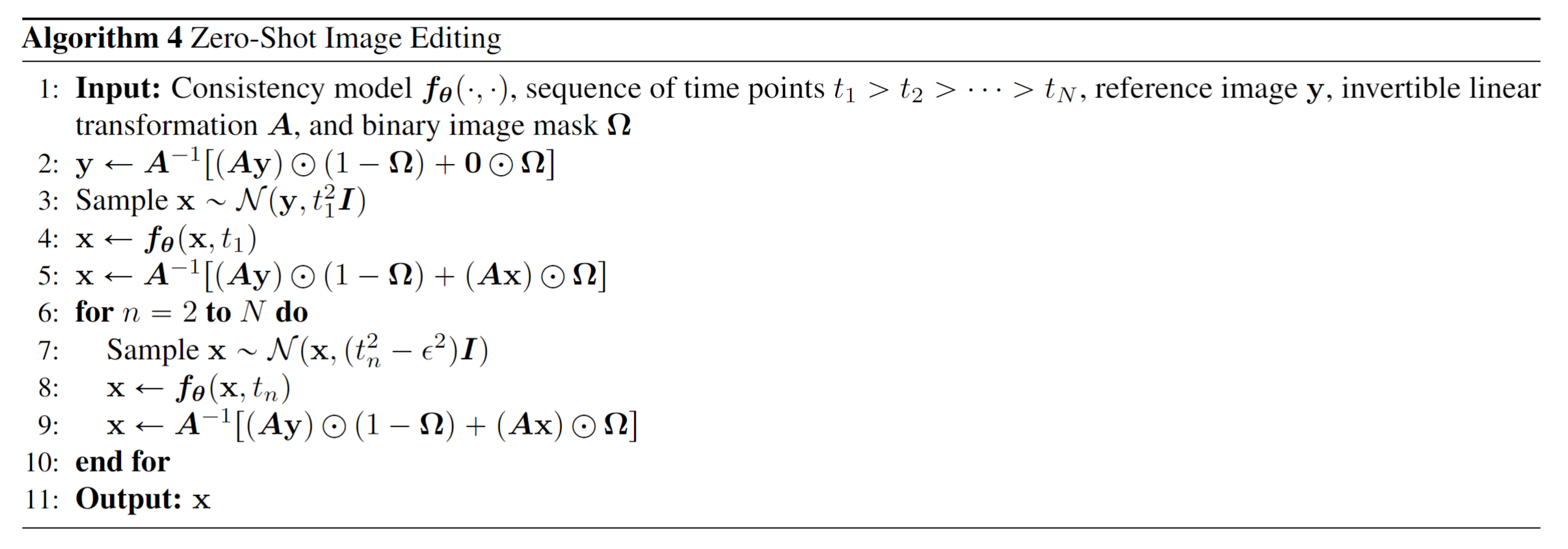
whether we design $A$ as an invertible matrix, and $\Omega$ as a mask.
具体见 Appendix D